起订:1台
供应:1000台
伴随工业自动化智能化的发展,对产品锁附质量与效率提出了更高要求;锁附过程从原来 的凭个人感觉与经验等不确定性因素到现在的实现锁附过程数字化,智能化,标准化。本公 司为了满足智能工厂对智能化锁附日益增长的需求而专门倾力打造的手持系智能电批,该系 列产品广泛应用于那些需要扭力,实时显示拧紧状态和防止工人漏拧的应用场合。

产品特点:
该系列产品采用高精密原装进口电机,美国原装高性能芯片打造而成,让物理硬件系统得到充分的保证, 再搭载我司博士团队开发的,高扭力控制算法,从而保证扭力精度和系统运行流畅。
(1) 扭力控制,精度可达±5%。(国际通用标准)
(2) 防静电设计,批头在转动与静止均保持与外界导通。
(3) 支持 8 条拧紧任务,支持 16 条任务。
(4) 拧紧记录可保存,可追溯,保存 7 天拧紧记录。(也可以链接 PC 端存取在电脑 盘中)
(5) 拧紧结果实时显示,让每一颗螺丝的结果显示在工人面前。
(6) 防漏拧功能让工人及时发现漏拧的螺丝,并能及时补拧。
(7)多种提示音,让工人眼晴专注于螺丝与吼位,闻声可辨拧紧结果。
主要性能参数:
(1)HL 型
输入电压:AC220V 额定功率:50W
扭力范围:0.3 Kgf.cm~1.8Kgf.cm 或 30mN.m~180mN.m 扭力精度:±5%
自动模式速度:30rpm~1200rpm 高速模式速度:30rpm~1800rpm
(2)HXL 型
扭力范围: 1.8 Kgf.cm~8.0 Kgf.cm 或 180 mN.m~800mN.m 扭力精度:±5%
自动模式速度:30rpm~1000rpm 高速模式速度:30rpm~1200rpm
系统支持 8 条任务设置,每条任务可分为 5 个拧紧步骤,2 个拧松步骤,1 个方向自由旋 转。一个锁附过程大概可以分为入牙,旋入,拧紧三个阶段,通过对每个步骤参数设置 来实现对三个不同阶段的控制。
–浮高界定圈数:用于浮高判定值设定;
运动圈数 < 设定圈数 - 浮高界定圈数 如果扭力已达到目标扭力,则报浮高
+滑牙界定圈数:用于滑牙判定值设定;
运动圈数 = 设定圈数 + 滑牙界定圈数 如果扭力未达到目标扭力, 则报滑牙
-扭力偏差下限:目标扭力值 –实际扭力值 >= 扭力偏差下限 报 扭力偏小;
+扭力偏差上限: 实际扭力值 - 目标扭力值 >= 扭力偏差上限 报 扭力偏大;
拧松有效触发的扭力阀值:拧松时扭力达到阀值后才算作是拧松有效的条件之一; 拧松有效触发的保持时间:拧松时扭力达到阀值后累加时间达到设定时是才算作是拧松有效 条件之一;
两个参数条件都满足后,走完拧松圈数才算拧松是有效,否则是拧松失败。
[保存] 保存当前控制器中的任务参数; [注意:保存参数时,请勿让电批停留在拧紧的螺丝上;保存等待 3 秒后进行后继操作。] [恢复出厂] 恢复控制器出厂时的默认任务参数; [注意:恢复出厂时,请勿让电批停留在拧紧的螺丝上;恢复出厂等待 3 秒后进行后继操作。]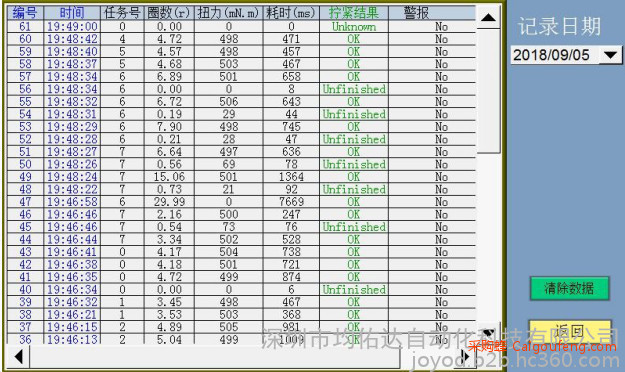
每拧紧一颗螺丝都会产生一条拧紧记录,记录着拧紧结果各类重要数据,让拧紧结果可 追溯。系统每天生成一个记录表,可以保存 7 天,7 天后记录会自动覆盖 7 天前的记录。 可以通过选择日期来查询某天生成的记录。点击清除记录,清除所有记录。
报警表如下:
编号
ERR0~3 灯
名称
警报原因
1
0000
浮高
未达到规定的行程下限,达到目标扭力;
2
0001
滑牙
达到规定的行程上限,未达到目标扭力;
3
0010
过流
电机线或电源线发生线路的短路,或者供电电压波动大;
4
0011
过压
供电电压超过控制器的正常电压范围;
5
0100
欠压
供电电压低于控制器的正常电压范围;
6
0101
飞车
上电的时候,批头不是自由悬空状态,两侧有障碍物;或者
目标转速超过 1800rpm;或者任务参数保存的时候,批头不 是自由悬空状态,两侧有障碍物;
7
0110
电批过热
运动中遇到障碍物;或者上电的时候,批头不是自由悬空状
态,两侧有障碍物;或者任务参数保存的时候,批头不是自 由悬空状态,两侧有障碍物;
8
0111
反转不到位
反转运动中遇到障碍物;编码器线没有连接或者接触不良
9
1000
位置偏差过大
运动中遇到障碍物;或者上电的时候,批头不是自由悬空状
态,两侧有障碍物;或者任务参数保存的时候,批头不是自 由悬空状态,两侧有障碍物;编码器线是否接好;
10
1001
电批断线
电批断线
11
1010
力矩偏
差过大
螺丝与批头不匹配;